
Wish Happy New Year
Wish Happy New Year

#include
Servo FUTABAservo; //Servo Objesi oluştutulur
void setup()
{
FUTABAservo.attach(9); // Servonun sinyali Arduinoda 9 nolu pine bağlanır
}
void loop()
{
FUTABAservo.write(0); // 0 derece ye git
delay(2000); // 2 saniye bekle
FUTABAservo.write(90); // 90 dereceye git
delay(1000); // 1 saniye bekle
}

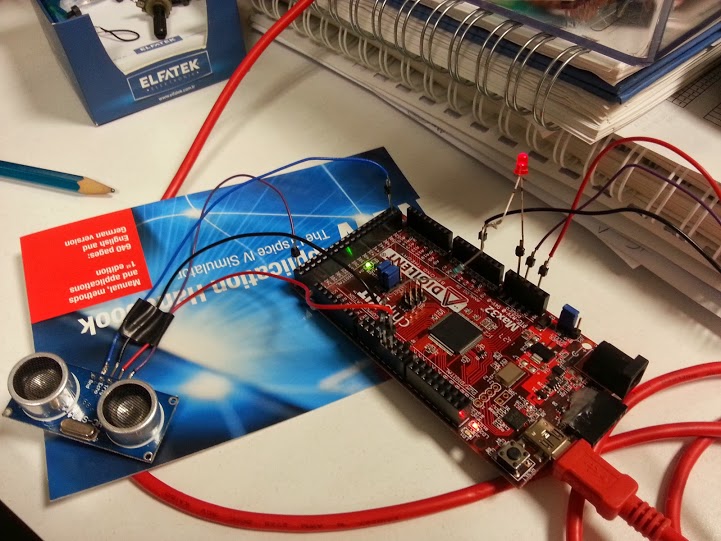
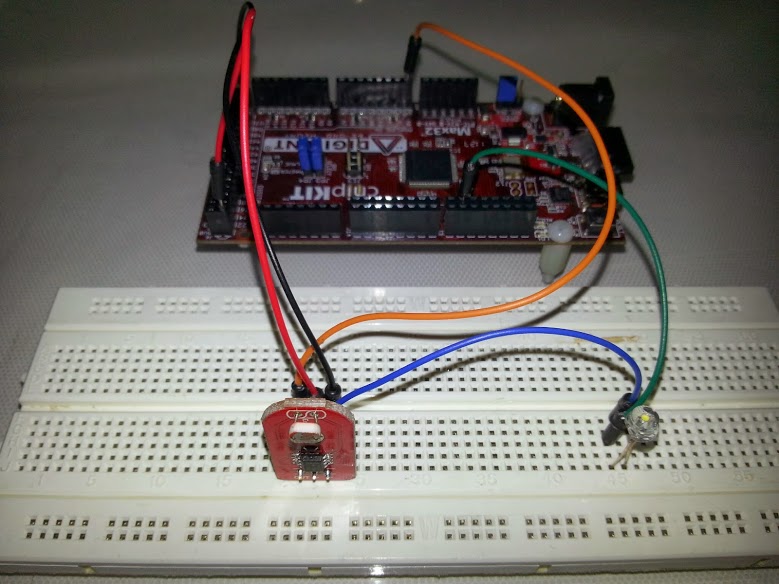
ChipKit ile Ultasonik sensör ile mesafe ölçümü.
Arduino uyumlu ChipKit (http://chipkit.net/) ilk yaptığım uygulama, oldukça başarılı bir arayüzü bulunmakta (http://chipkit.net/started/) ve programlaması beklediğimden daha kolaymış.
Ultrasonik sensörden mesafe ölçmek için aşağıdaki test programını kullandım
const int inputPin = 4; //Yansıyan sinyal girişi
const int outputPin = 5; //Sinyal gönderme çıkışı
const int ledpin = 3;
void setup()
{
Serial.begin(9600);
pinMode(ledpin,OUTPUT);
pinMode(inputPin,INPUT);
pinMode(outputPin,OUTPUT);
}
void loop()
{
digitalWrite(outputPin,LOW) ;
delayMicroseconds( 2 ) ;
digitalWrite(outputPin,HIGH) ;
delayMicroseconds( 10 ) ;
digitalWrite(outputPin,LOW) ;
int distance =pulseIn(inputPin,HIGH) ;
distance = distance/58; // ölçü birimini cm çevir
Serial.println(distance); //hesaplanan değeri bilgisayara gönder
delay(50) ;
if(distance >= 50)
{
digitalWrite(ledpin,HIGH) ;
}
else
digitalWrite(ledpin,LOW) ;
}
Bu kart ile değişik uygulamaları kolayca yapabileceiğimi düşünüyorum. ebay’ dan getirttiğim farklı farklı sesnörler bulunmakta onları da sırasıyla denemek için sabırsızlanıyorum.
Dr Süleyman Canan
Bu bölümdeCCS PIC C derleyicisi ile kesmelerin kullanımı gösterilecektir.
TIMER0 kesmesi kullanarak hassas bir şekilde bir LED’i yakıp söndürebiliriz. TIMER0 8 bit bir sayıcıdır.
PIC kesmesinin her 1 ms gerçekleşmesini istersek
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_16|RTCC_8_BIT);
ile frekans önbölücü 16′ ya ayarlanır, PIC kendi içinde de otomatik olarak 4′ e bölmektedir,
böylece hesap (16000000Hz/16)/4=250000Hz olur
Kesmeye bir kere giriş süresi 1/250000 sn’ dir, yani kesme her 0.000004 sn’de gerçekleşir.
her 1ms’ de kesme gerçekleşmesi için TIMER0 sayaç 250 kez sayması gerekir (0.000004*250=1ms).
Bunun içinde main ve kesme rutininde
set_timer0(5);
komutu yerleştirilir.
Kesme rutini işlendikten sonra en son set_timer0(5); komutu işletir ön sayıcıyı tekrar kurulmuş olur.
Eğer sayaç önyükleme = ise Sayaç 0 dan 255′ kadar sayar, bu komutla sayaç 5 ten 255′ e kadar sayar 255′ ten 0’a geçişte kesme gerçekleşir.
Öncelikle PIC işlemcinin 16MHz de çalışacak şekilde ayarlanır.
Bu durumda:
short toggleled;
unsigned int16 ledcounter;
void main()
{
setup_adc_ports(NO_ANALOGS|VSS_VDD);
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_16|RTCC_8_BIT);
setup_oscillator(OSC_16MHZ);
set_tris_c(0x00);
set_timer0(5);
enable_interrupts(INT_TIMER0);
enable_interrupts(GLOBAL);
for(;;){}
}
Aşağıdaki programda kesme rutini verilmiştir
#int_TIMER0
void TIMER0_isr(void)
{
ledcounter++;
if(ledcounter=150)
{
ledcounter=0;
toggleled^=1;
}
if(toggleled) output_high(PIN_C0);
else output_low(PIN_C0);
set_timer0(5);
clearinterrupt(int_timer0);
}
PIN_C0 pinine bir LED bağlarsak, LED 150 ms yanar ve 150 ms sönük kalır.
Bunu gerçekleştirmek için program her kesme rutinine girince ledcounter sayacını artırır, 150 ye yani 150 ms2 ye eşit ya da büyük olunca
ledcounter sıfırlanır ve toggleled 1 ile XOR’ lanır, XOR işlemi her 150ms de bir toggleled değişkenini 0 dadn 1 e daha sonra 1 den 0 değiştirir.
Bu işlem sonsuza kadar devaö eder.
Eğer toggleled 1 ise LED yanar değilse söner.
Daha sonraki programlama tekniklerinde bu işlemleri daha da kısaltabileceiğimizi veya daha anlaşılabilir hale getirebileceiğimiz göreceğiz.
Dr Süleyman CANAN

The Very Distant
Camera: Canon EOS 400D DIGITAL
Date: 30.06.2010 14:08:50
Aperture: f 8,0
ISO: 100
Shutter speed: 1/160 s
EV ±0,00 EV
Program: P – Programmed auto
Flash: Not fired
Zoom: 55,0 mm Real
Custom rendered: Contrast

“Novembers”


You must be logged in to post a comment.